Chapter 2 Revisão Algebra
2.1 Sistemas lineares
Definição: O vetor \(x_0\) é dito uma solução do sistema de equações lineares
\(A_{mxn}x_{nx1} = b_{mx1}\)
Se, com a substituição de \(x_0\) em \(x\) temos o conjunto de identidades verdadeiras
EXEMPLO: O sistema:
\[\begin{cases} x_1 + 3x_2 = 6 \\ 3x_1 + x_2 = 6 \end{cases}\]Que pode ser escrito como:
\[\begin{equation*} \underbrace{ \left[ \begin{array}{cc} 1 & 3 \\ 3 & 1 \end{array} \right] }_{A} \underbrace{ \left[ \begin{array}{cc} x_1 \\ x_2 \end{array} \right] }_{x} = \underbrace{ \left[ \begin{array}{cc} 6 \\ 6 \end{array} \right] }_{b} \end{equation*}\]Tem solução \(x_0^T = [3/2,3/2]\), pois ao substituirmos \(x_0\) no sistema:
\[\begin{cases} 3/2 + 3(3/2) = 6 \rightarrow 6=6\\ 3(3/2) + 3/2 = 6 \rightarrow 6=6 \end{cases}\]Podemos classificar os sistemas e suas relações em 3 casos, em função do número de equações (\(m\)) e variáveis (\(n\)).
Caso 1: \(m > n\):
Nesse caso o sistema só vai possuir solução se existirem no máximo \(n\) equações linearmente independentes:
EXEMPLO:
\[\begin{cases} x_1 = 2 \\ 2x_1 = 4 \end{cases}\]Sistema 2x1, porém 1 equação LI, portanto possui solução.
EXEMPLO:
\[\begin{cases} x_1 = 2 \\ x_1 = 4 \end{cases}\]Sistema 2x1, porém 2 equações LI, portanto não possui solução.
Caso 2: \(m = n\):
Se as equações forem LI, então o sistema possui uma solução.
EXEMPLO:
\[\begin{cases} x_1 + 2x_2 + 3x_3 = 9 \\ 2x_1 - x_2 + x_3 = 8 \\ 3x_1 \quad \quad - x_3 = 3 \end{cases}\]que pode ser escrito como:
\[\begin{equation*} \underbrace{ \left[ \begin{array}{ccc} 1 & 2 & 3 \\ 2 & -1 & 1 \\ 3 & 0 & -1 \end{array} \right] }_{A} \underbrace{ \left[ \begin{array}{c} x_1 \\ x_2 \\ x_3 \end{array} \right] }_{x} = \underbrace{ \left[ \begin{array}{c} 9 \\ 8 \\ 3 \end{array} \right] }_{b} \end{equation*}\]Tem solução \(x_0^T=[2,-1,3]\)
Caso 3: \(m < n\): Se as equações forem LI, então o sistema possui infinitas soluções, com \(n-m\) variáveis livres (podem assumir qualquer valor).
EXEMPLO:
\[\begin{cases} 2x_1 + 3x_2 + x_3 \quad \quad = 120 \\ x_1 \quad \quad \quad \quad \quad + x_4 \quad = 40 \\ \quad \quad \quad x_2 \quad \quad \quad \quad + x_5 = 30 \end{cases}\]Temos \(n-m\) = 5-3 = 2 variáveis livres, podemos assumir (arbitrariamente) \(x_1 = 0\), \(x_2 = 0\). Uma solução para o sistema é então \(x_0^T = [0,0,120,40,30]\).
2.2 Resolução de sistemas lineares
2.2.1 Sistemas canônicos
Se um sistema de equações lineares estiver na forma canônica, podemos encontrar facilmente uma (pelo menos) solução para o mesmo.
Definição: O sistema \(Ax = b\) está na forma canônica em relação a \(x_B\) se o mesmo puder ser reescrito como:
\(Ix_B + \bar Ax_N = b\)
Em que \(I\) é a matriz identidade \(mxm\).
Ou seja, devem existir \(m\) variáveis que possuem valor 1 em uma equação e zero em todas as outras, todas em equações diferentes.
EXEMPLOS: Para cada um dos sistemas abaixo verifique se ele está na forma canônica, e em relação a quais variáveis. Se sim, determine pelo menos uma solução para o mesmo
A:
\[\begin{cases} x_1 \quad = 10 \\ \quad + x_2 = 5 \end{cases}\]É canônico em relação a \([x_1,x_2]\), pois:
\[\begin{equation*} \underbrace{ \left[ \begin{array}{ccc} 1 & 0 \\ 0 & 1 \end{array} \right] }_{I} \underbrace{ \left[ \begin{array}{c} x_1 \\ x_2 \end{array} \right] }_{x_B} + \underbrace{ 0 }_{\bar A} = \underbrace{ \left[ \begin{array}{c} 10 \\ 30 \\ 20 \end{array} \right] }_{b} \end{equation*}\]Note que o componente principal para definir um sistema canônico é a matriz identidade (\(I\)): com ela definida, todos os outros termos podem ser encontrados, sem uma identidade o sistema não será canônico.
B:
\[\begin{cases} x_1 + 3x_2 \quad \quad + 2 x_4 \quad \quad = 10 \\ \quad \quad \quad \quad + x_3 + 4x_4 \quad \quad = 30 \\ \quad \quad 2x_2 \quad \quad \quad \quad \quad + x_5 = 20 \end{cases}\]É canônico em relação a \(x_B^T = [x_1,x_3,x_5]\), pois:
\[\begin{equation*} \underbrace{ \left[ \begin{array}{ccc} 1 & 0 & 0 \\ 0 & 1 & 0 \\ 0 & 0 & 1 \end{array} \right] }_{I} \underbrace{ \left[ \begin{array}{c} x_1 \\ x_3 \\ x_5 \end{array} \right] }_{x_B} + \underbrace{ \left[ \begin{array}{ccc} 3 & 2 \\ 0 & 4 \\ 2 & 0 \end{array} \right] }_{\bar A} \underbrace{ \left[ \begin{array}{c} x_2 \\ x_4 \end{array} \right] }_{x_N} = \underbrace{ \left[ \begin{array}{c} 10 \\ 30 \\ 20 \end{array} \right] }_{b} \end{equation*}\]Com uma possível solução: \(x_B^T = [x_1,x_3,x_5] = [10,30,20]\) e \(x_N^T = [x_2,x_4] = [0,0]\).
C:
\[\begin{cases} 4x_1 + 2x_2 \quad \quad = 20 \\ x_1 \quad \quad \quad + x_3 = 9 \\ \quad \quad \quad x_2 \quad \quad = 11 \end{cases}\]Não está na forma canônica (não é possível encontrar uma submatriz identidade \(I\)).
2.2.2 Pivoteamento
Vimos que se o sistema está na forma canônica em relação a \(x_B\), conseguimos extrair uma solução só de olhar as equações. Uma forma, então, de resolver sistemas lineares, é transformá-los na forma canônica. Aplicamos diversas operações no sistema (pivoteamento) para gerar um sistema equivalente na forma canônica. O pivoteamento é feito usando as duas operações elementares nas linhas do sistema:
- Substituir uma equação \(L_t\) por \(kL_t\), mantendo as outras iguais (\(k \neq 0\))
- Substituir \(L_t\) por \(L_t + kL_i\), onde \(L_i\) é qualquer outra equação do sistema.
EXEMPLOS: Encontre uma solução para cada um dos sistemas abaixo, colocando-os na forma canônica em relação as variáveis indicadas:
A: Em relação a \(x_1\) e \(x_2\).
\[\begin{cases} \quad \quad 2x_2 + 2x_3 + 2x_4 = 10 \\ x_1 - 2x_2 - x_3 + x_4 = 2 \end{cases}\]SOLUÇÃO
\(L_1 \leftarrow \frac{1}{2}L_1\)
\[\begin{cases} \quad \quad x_2 + x_3 + x_4 = 5 \\ x_1 - 2x_2 - x_3 + x_4 = 2 \end{cases}\]\(L_2 \leftarrow L_2 + 2L_1\)
\[\begin{cases} \quad \quad x_2 + x_3 + x_4 = 5 \\ x_1 \quad \quad \quad x_3 + 3x_4 = 12 \end{cases}\]Com essas operações já conseguimos reescrever o sistema de forma canônica:
\[\begin{equation*} \underbrace{ \left[ \begin{array}{ccc} 1 & 0 \\ 0 & 1 \\ \end{array} \right] }_{I} \underbrace{ \left[ \begin{array}{c} x_1 \\ x_2 \end{array} \right] }_{x_B} + \underbrace{ \left[ \begin{array}{ccc} 1 & 3 \\ 1 & 1 \\ \end{array} \right] }_{\bar A} \underbrace{ \left[ \begin{array}{c} x_3 \\ x_4 \end{array} \right] }_{x_N} = \underbrace{ \left[ \begin{array}{c} 12 \\ 5 \end{array} \right] }_{b} \end{equation*}\]Com uma possível solução: \(x_B^T = [x_1,x_2] = [5,12]\) e \(x_N^T = [x_3,x_4] = [0,0]\).
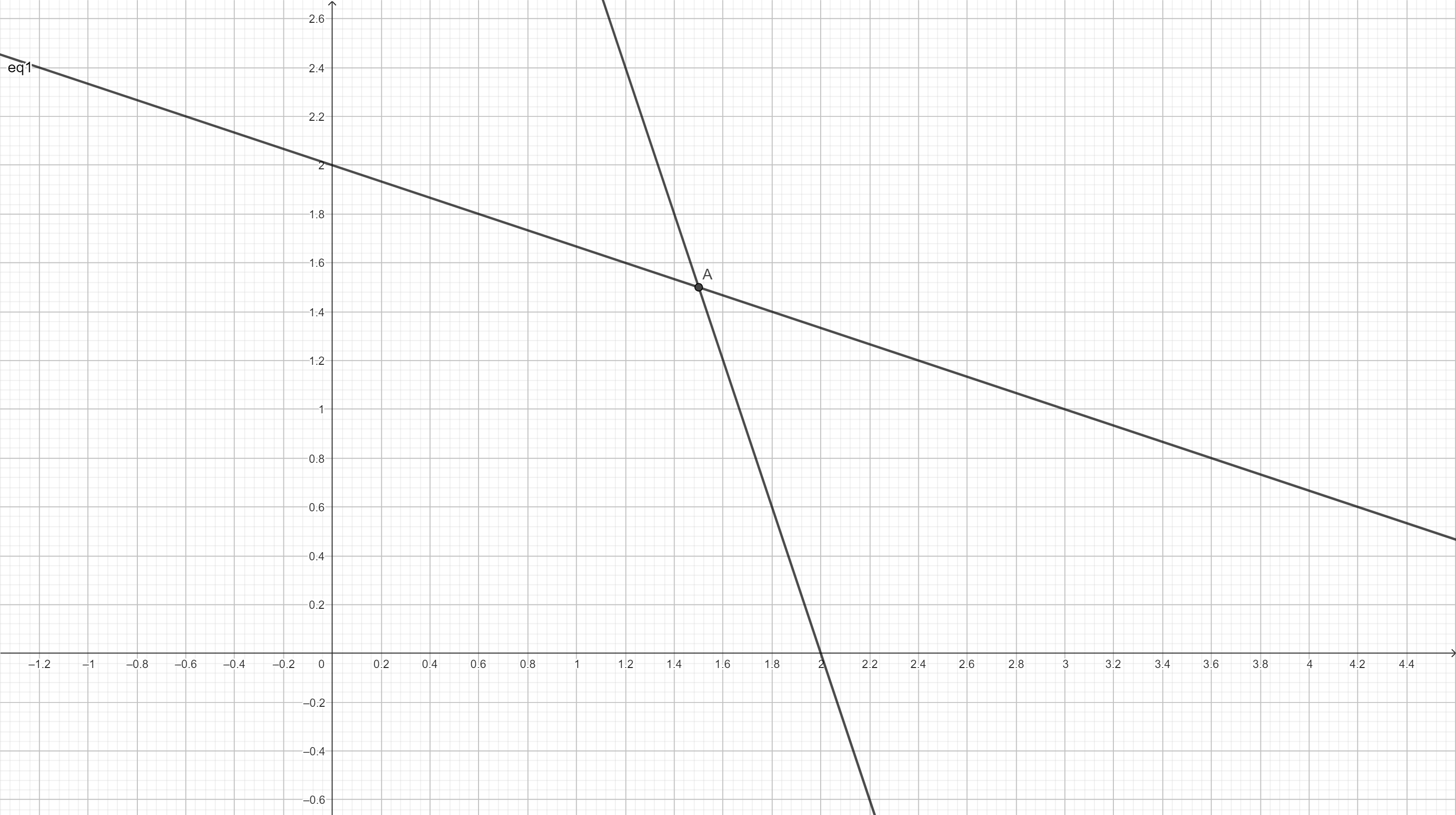
B: Em relação a \(x_1\) e \(x_2\).
\[\begin{cases} x_1 + 3x_2 = 6 \\ 3x_1 + x_2 = 6 \end{cases}\]SOLUÇÃO
\(L_2 \leftarrow L_2 - 3L_1\)
\[\begin{cases} x_1 + 3x_2 = 6 \\ \quad \quad -8x_2 = -12 \end{cases}\]\(L_2 \leftarrow \dfrac{-1}{8}L_2\)
\[\begin{cases} x_1 + 3x_2 = 6 \\ \quad \quad x_2 = 3/2 \end{cases}\]\(L_1 \leftarrow L_1 - 3L_2\)
\[\begin{cases} x_1 \quad \quad = 3/2 \\ \quad \quad x_2 = 3/2 \end{cases}\]Temos que:
\[\begin{equation*} \underbrace{ \left[ \begin{array}{ccc} 1 & 0 \\ 0 & 1 \\ \end{array} \right] }_{I} \underbrace{ \left[ \begin{array}{c} x_1 \\ x_2 \end{array} \right] }_{x_B} = \underbrace{ \left[ \begin{array}{c} 3/2 \\ 3/2 \end{array} \right] }_{b} \end{equation*}\]Com solução \(x_B^T = [x_1,x_2] = [3/2,3/2]\)
OBS: Em duas variáveis, a solução do sistema é a intersecção das duas retas:
C: Em relação a \(x_1\),\(x_2\) e \(x_3\).
\[\begin{cases} x_1 + x_2 + x_3 + x_4 = 6 \\ 3x_1 + 6x_2 + x_3 + x_4 = 2 \\ x_1 + 4x_2 + 3x_3 + x_4 = 10 \end{cases}\]SOLUÇÃO
Realizando as operações na forma matricial:
\[\begin{equation*} \left[ \begin{array}{ccc} 1 & 1 & 1 & 1 & 6 \\ 3 & 6 & 1 & 1 & 2 \\ 1 & 4 & 3 & 1 & 10 \\ \end{array} \right] \end{equation*}\]\(L_2 \leftarrow L_2 - 3L_1\)
\(L_3 \leftarrow L_3 - L_1\)
\[\begin{equation*} \left[ \begin{array}{ccc} 1 & 1 & 1 & 1 & 6 \\ 0 & 3 & -2 & -2 & -16 \\ 0 & 3 & 2 & 0 & 4 \\ \end{array} \right] \end{equation*}\]\(L_2 \leftarrow L_2/3\)
\[\begin{equation*} \left[ \begin{array}{ccc} 1 & 1 & 1 & 1 & 6 \\ 0 & 1 & -2/3 & -2/3 & -16/3 \\ 0 & 3 & 2 & 0 & 4 \\ \end{array} \right] \end{equation*}\]\(L_1 \leftarrow L_1 - L_2\)
\(L_3 \leftarrow L_3 - 3L_2\)
\[\begin{equation*} \left[ \begin{array}{ccc} 1 & 0 & 5/3 & 5/3 & 34/3 \\ 0 & 1 & -2/3 & -2/3 & -16/3 \\ 0 & 0 & 4 & 2 & 20 \end{array} \right] \end{equation*}\]\(L_3 \leftarrow L_3/4\)
\[\begin{equation*} \left[ \begin{array}{ccc} 1 & 0 & 5/3 & 5/3 & 34/3 \\ 0 & 1 & -2/3 & -2/3 & -16/3 \\ 0 & 0 & 1 & 1/2 & 5 \end{array} \right] \end{equation*}\]\(L_2 \leftarrow L_2 + 2/3L_3\)
\(L_1 \leftarrow L_1 + 5/3L_3\)
\[\begin{equation*} \left[ \begin{array}{ccc} 1 & 0 & 0 & 5/6 & 3 \\ 0 & 1 & 0 & -1/3 & -2 \\ 0 & 0 & 1 & 1/2 & 5 \end{array} \right] \end{equation*}\]Podemos reescrever como:
\[\begin{equation*} \underbrace{ \left[ \begin{array}{ccc} 1 & 0 & 0 \\ 0 & 1 & 0 \\ 0 & 0 & 1 \end{array} \right] }_{I} \underbrace{ \left[ \begin{array}{c} x_1 \\ x_2 \\ x_3 \end{array} \right] }_{x_B} + \underbrace{ \left[ \begin{array}{ccc} 5/6 \\ -1/3 \\ 1/2 \end{array} \right] }_{\bar A} \underbrace{ \left[ \begin{array}{c} x_4 \end{array} \right] }_{x_N} + = \underbrace{ \left[ \begin{array}{c} -3 \\ -2 \\ 5 \end{array} \right] }_{b} \end{equation*}\]Temos uma solução com: \(x_B^T = [x_1,x_2,x_3] = [3,-5,5]\) e \(x_N^T = [0]\).
D: Mesmo sistema anterior, em relação à \(x_2\),\(x_3\) e \(x_4\).
SOLUÇÃO
Realizando as operações na forma matricial:
\[\begin{equation*} \left[ \begin{array}{ccc} 1 & 1 & 1 & 1 & 6 \\ 3 & 6 & 1 & 1 & 2 \\ 1 & 4 & 3 & 1 & 10 \\ \end{array} \right] \end{equation*}\]\(L_2 \leftarrow L_2 - 6L_1\)
\(L_3 \leftarrow L_3 - 4L_1\)
\[\begin{equation*} \left[ \begin{array}{ccc} 1 & 1 & 1 & 1 & 6 \\ -3 & 0 & -5 & -5 & -34 \\ -3 & 0 & -1 & -3 & -14 \end{array} \right] \end{equation*}\]\(L_2 \leftarrow L_2/-5\)
\(L_1 \leftarrow L_1 - L_2\)
\(L_3 \leftarrow L_3 + L_2\)
\[\begin{equation*} \left[ \begin{array}{ccc} 2/5 & 1 & 0 & 0 & -4/5 \\ 3/5 & 0 & 1 & 1 & 34/5 \\ 12/5 & 0 & 0 & -2 & -36/5 \end{array} \right] \end{equation*}\]\(L_3 \leftarrow L_3/-2\)
\(L_2 \leftarrow L_2 - L_3\)
\[\begin{equation*} \left[ \begin{array}{ccc} 2/5 & 1 & 0 & 0 & -4/5 \\ 9/5 & 0 & 1 & 0 & 16/5 \\ -6/5 & 0 & 0 & 1 & 18/5 \end{array} \right] \end{equation*}\]Podemos reescrever como:
\[\begin{equation*} \underbrace{ \left[ \begin{array}{ccc} 1 & 0 & 0 \\ 0 & 1 & 0 \\ 0 & 0 & 1 \end{array} \right] }_{I} \underbrace{ \left[ \begin{array}{c} x_2 \\ x_3 \\ x_4 \end{array} \right] }_{x_B} + \underbrace{ \left[ \begin{array}{ccc} 2/5 \\ 9/5 \\ -6/5 \end{array} \right] }_{\bar A} \underbrace{ \left[ \begin{array}{c} x_1 \end{array} \right] }_{x_N} + = \underbrace{ \left[ \begin{array}{c} -4/5 \\ 16/5 \\ 18/5 \end{array} \right] }_{b} \end{equation*}\]2.3 Representação de inequações lineares
Para representar uma inequação linear (em duas variáveis), faça:
- Encontre a reta considerando a inequação como uma equação.
- A reta divide o plano em 2 partes. Selecione um ponto de uma das duas partes e substitua na inequação, se ela for satisfeita, a área deste lado representa a inequação, caso contrário a outra.
A representação de um sistema de inequações consiste na intersecção de todas as áreas das inequações.
EXEMPLOS: Represente as regiões delimitadas pelos sistemas:
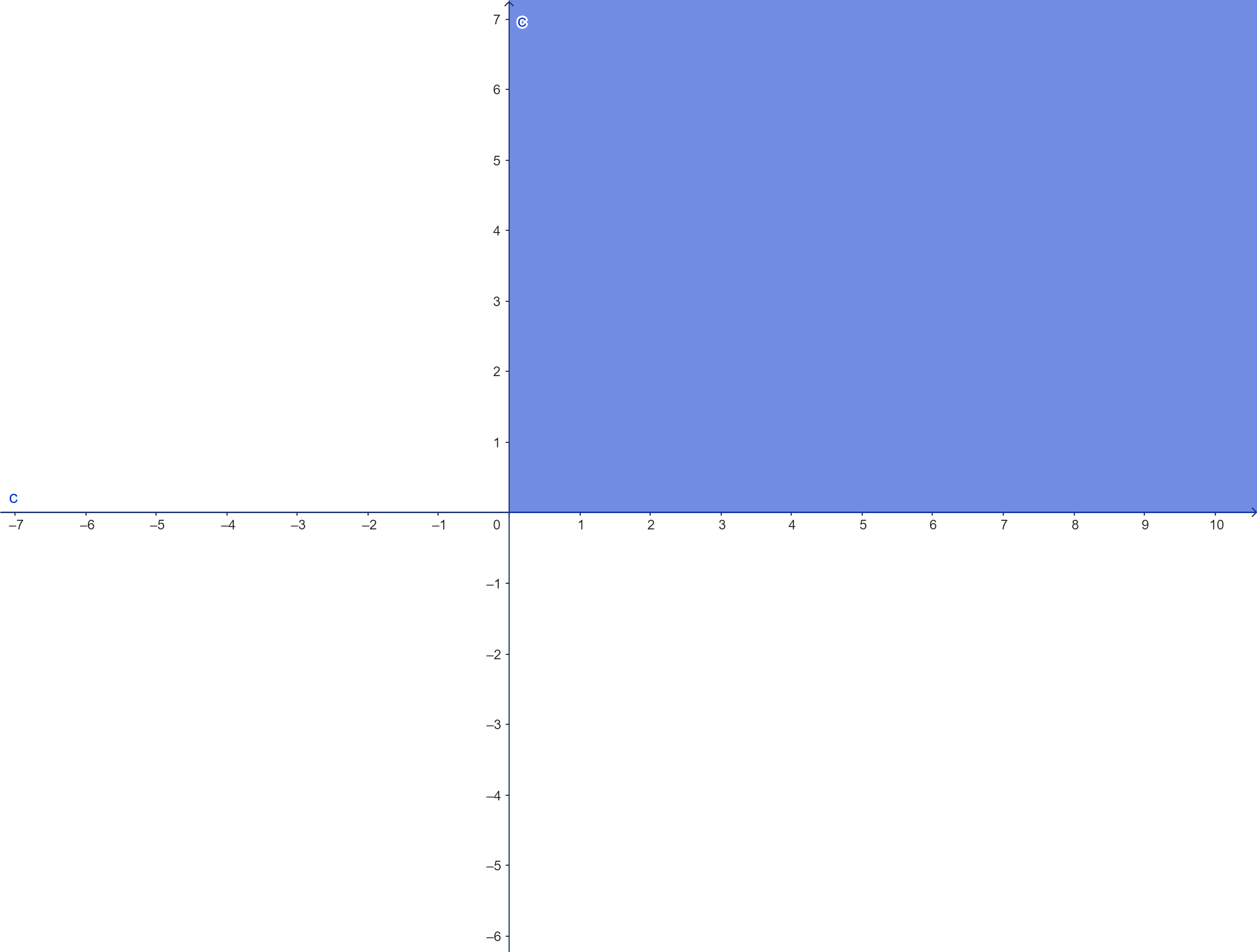
A:
\[\begin{cases} x_1 \quad \geq 0 \\ \quad x_2 \geq 0 \end{cases}\]SOLUÇÃO
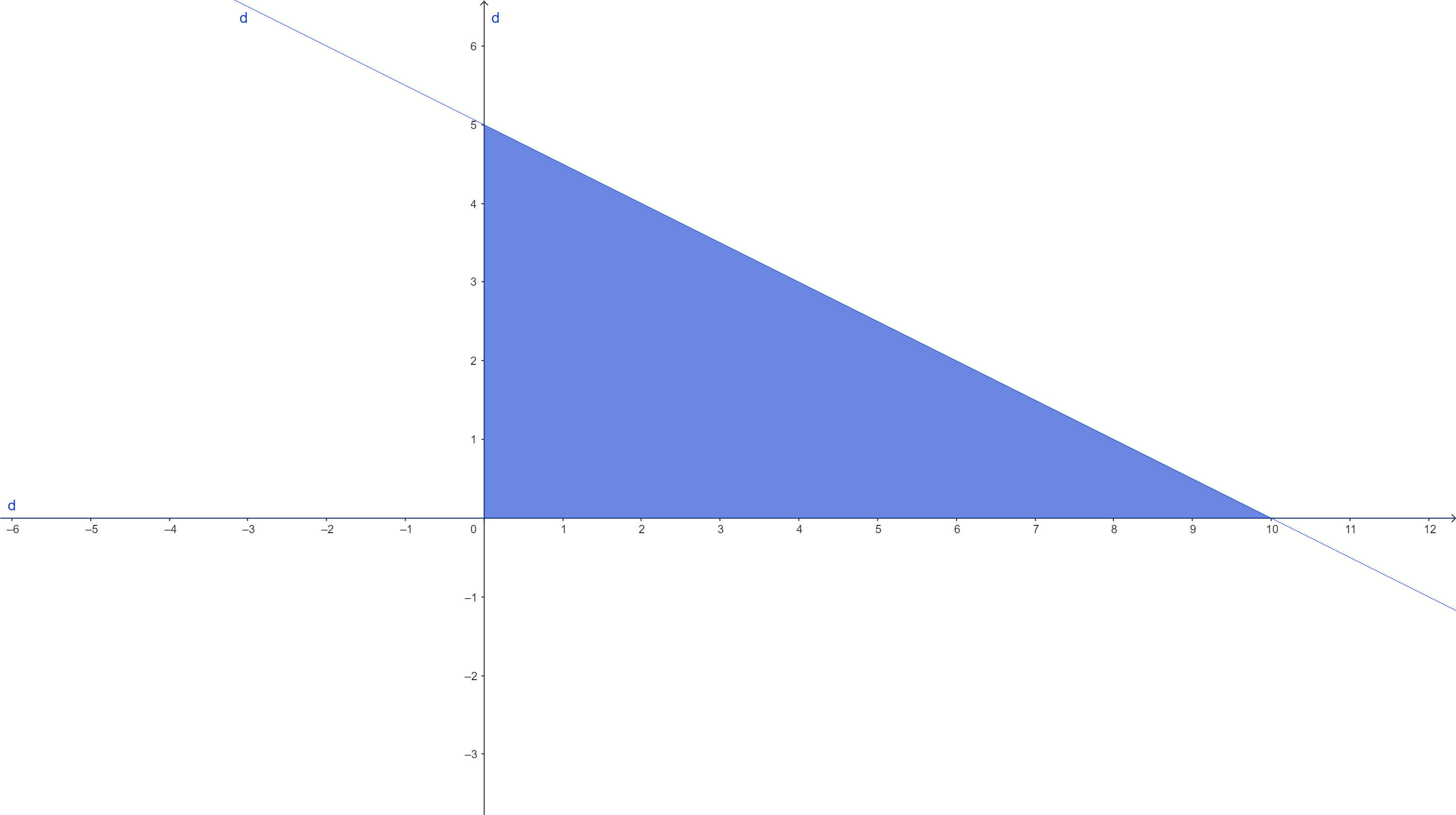
B:
\[\begin{cases} x_1 + 2x_2 \leq 10 \\ x_1,x_2 \quad \geq 0 \end{cases}\]SOLUÇÃO
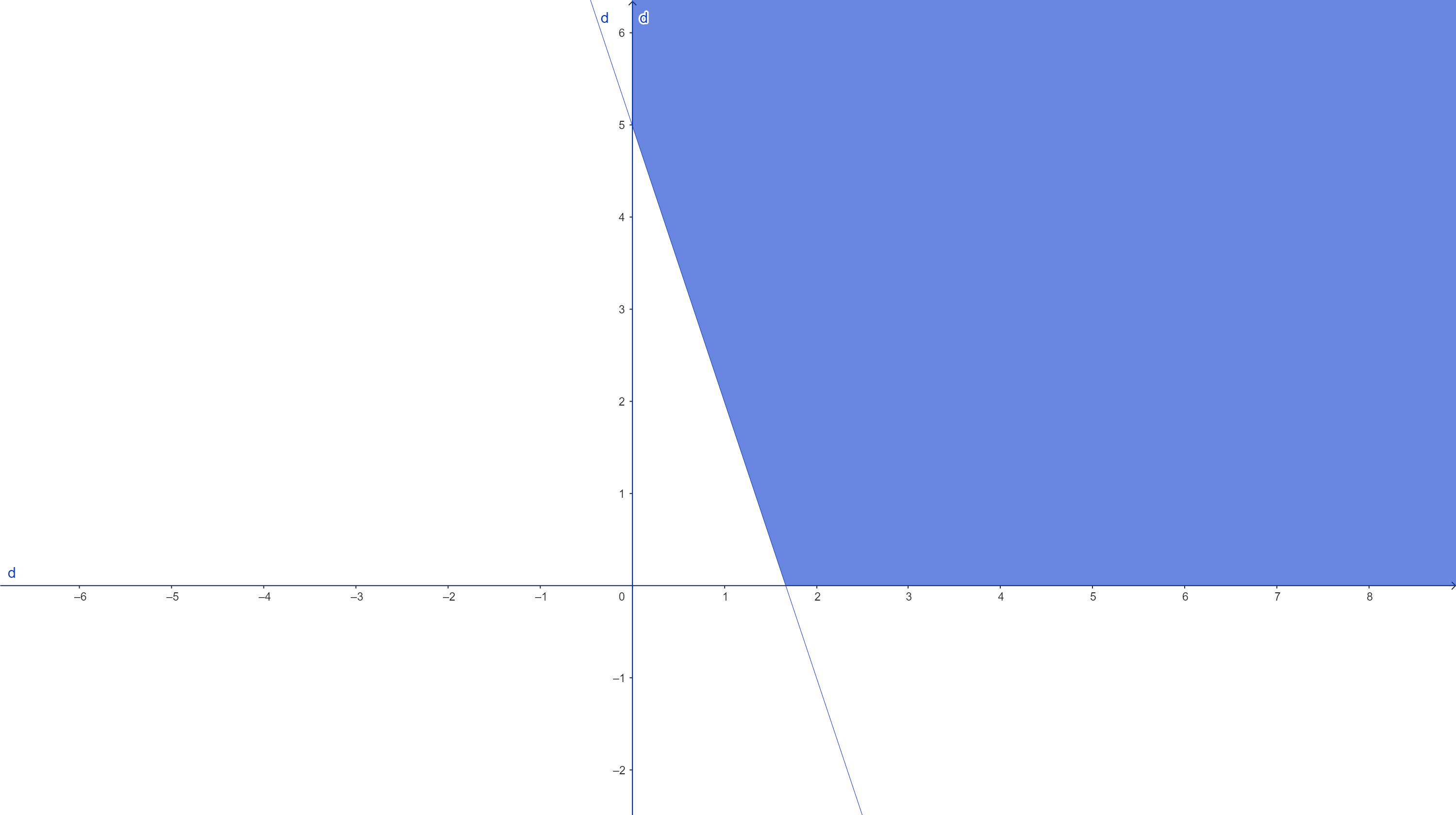
C:
\[\begin{cases} 3x_1 + x_2 \geq 5 \\ x_1,x_2 \quad \geq 0 \end{cases}\]SOLUÇÃO
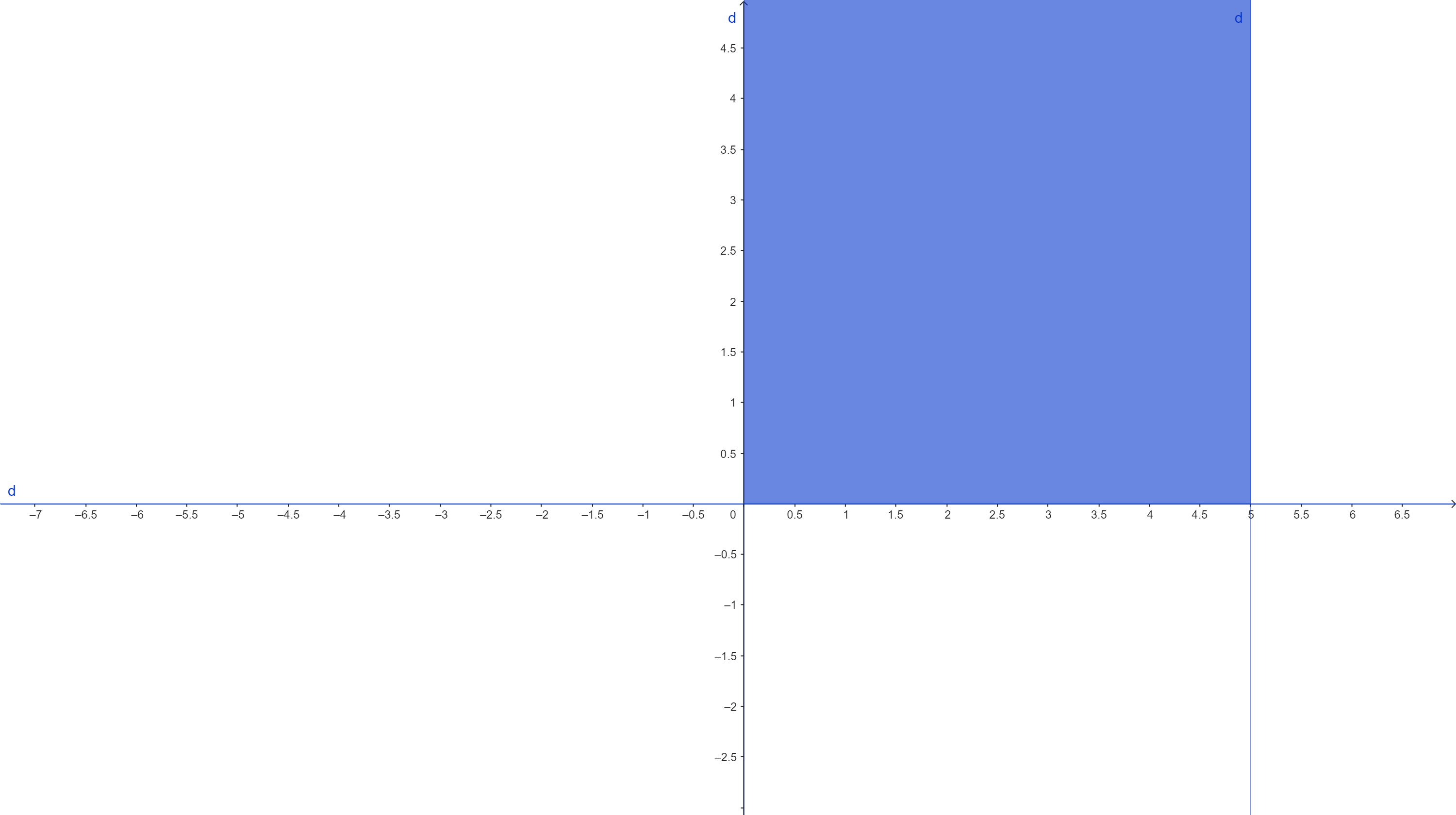
D:
\[\begin{cases} x_1 \leq 5 \\ x_1,x_2 \geq 0 \end{cases}\]SOLUÇÃO
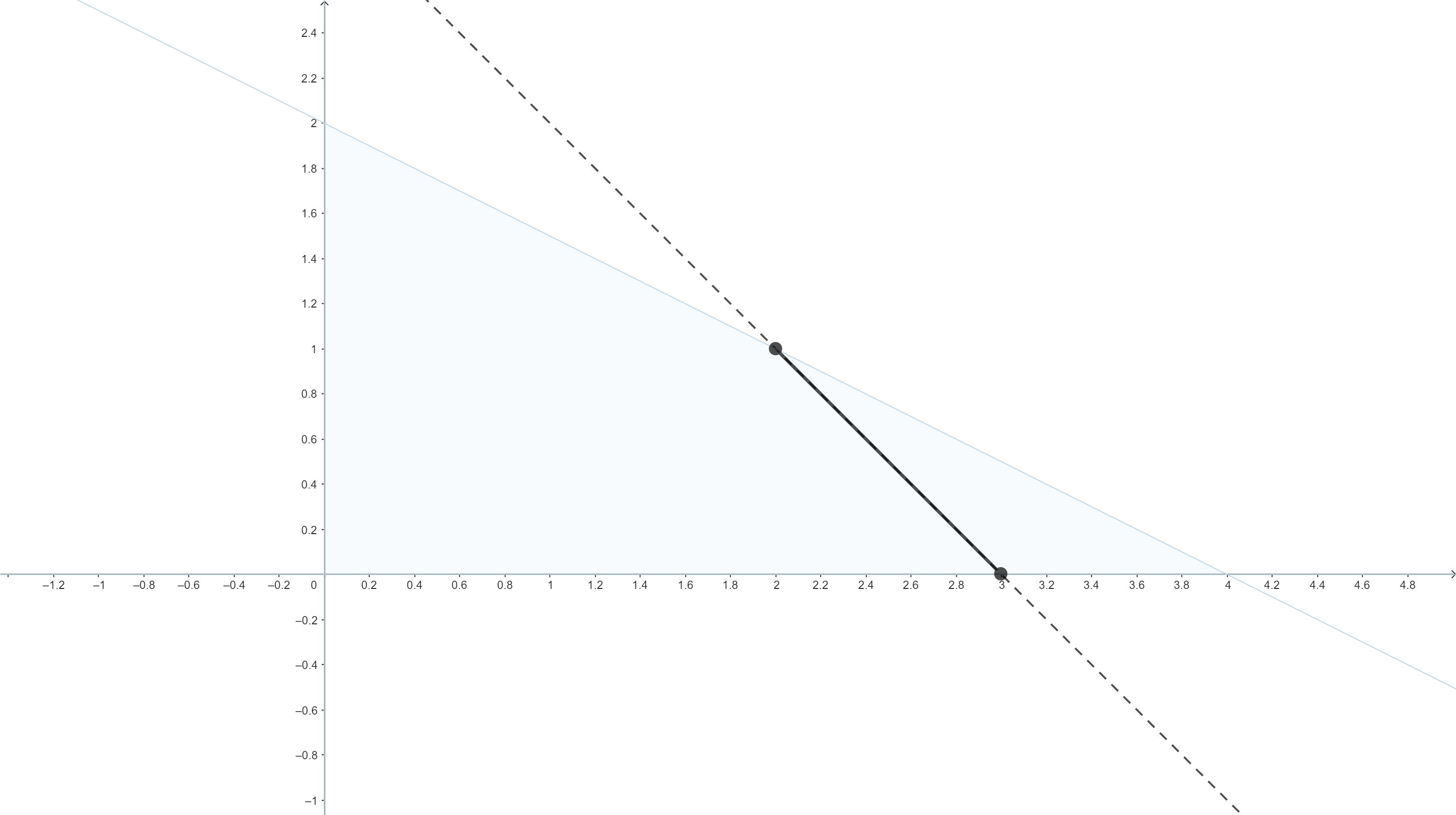
E:
\[\begin{cases} x_1 + x_2 = 3 \\ x_1 + 2x_2 \leq 4 \\ x_1,x_2 \quad \geq 0 \end{cases}\]SOLUÇÃO
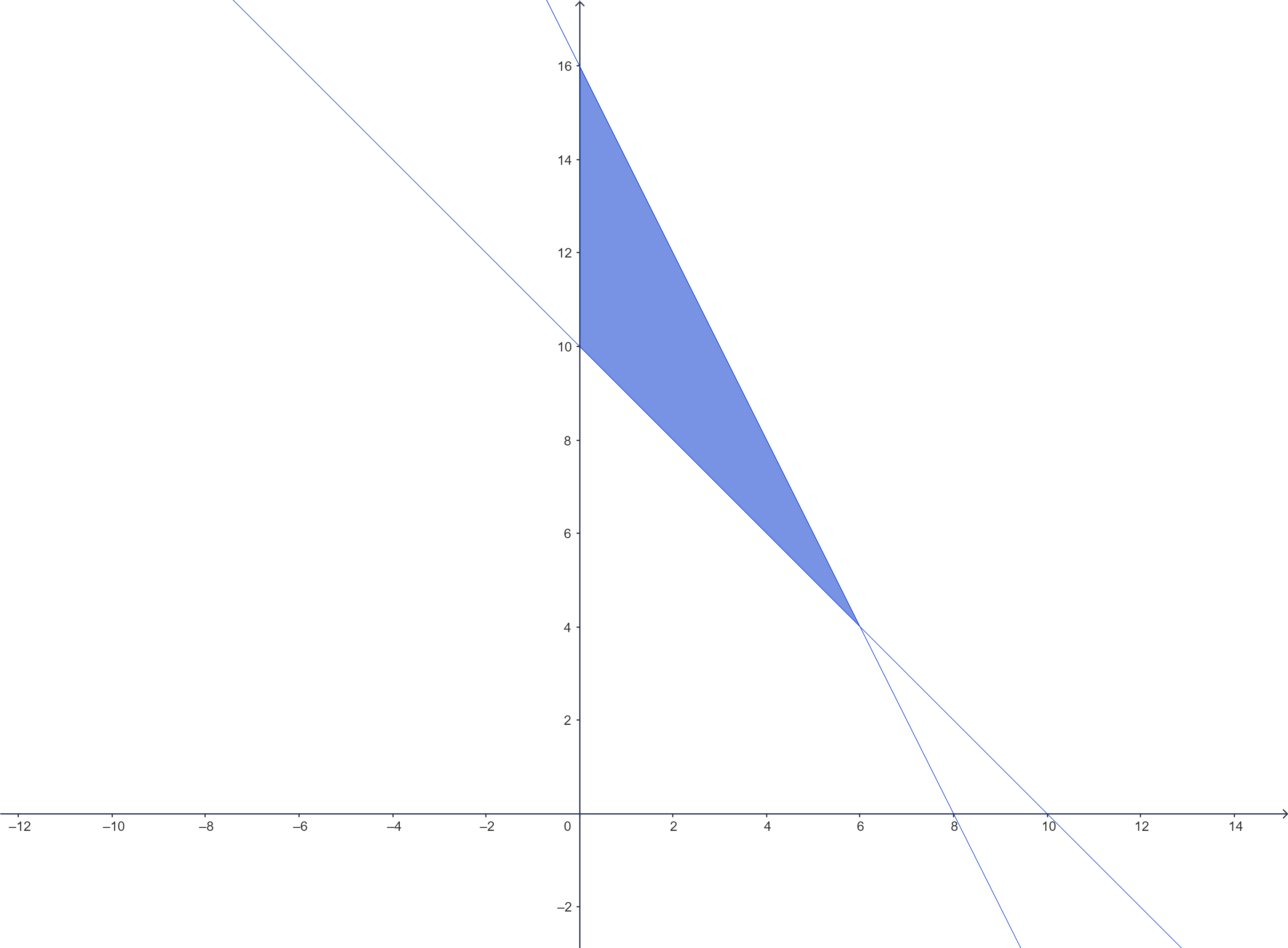
F:
\[\begin{cases} x_1 + x_2 \geq 10 \\ 2x_1 + x_2 \leq 16 \\ x_1,x_2 \quad 0 \end{cases}\]SOLUÇÃO
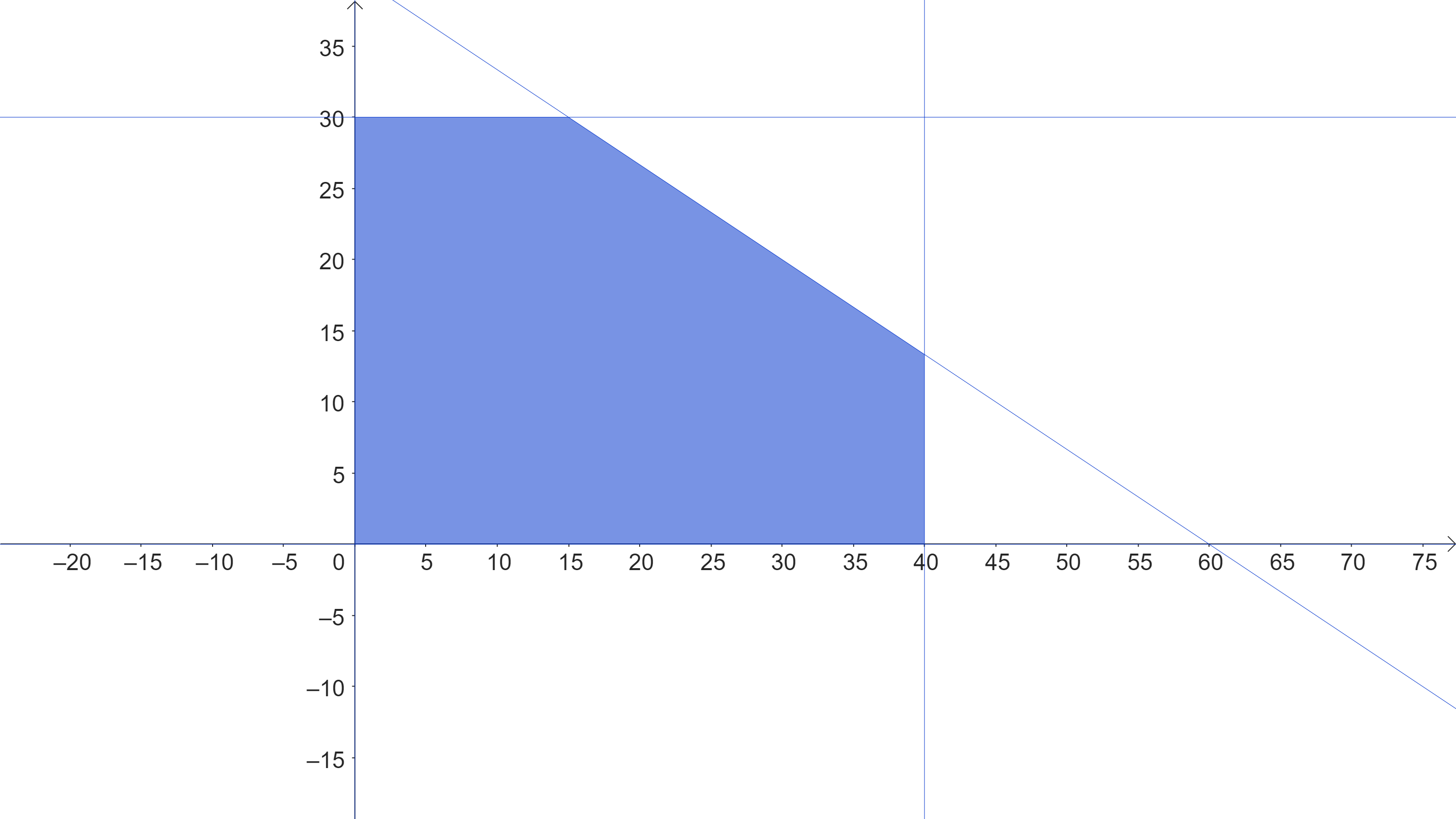
G:
\[\begin{cases} 2x_1 + 3x_2 \leq 120 \\ x_1 \quad \quad \quad \leq 40 \\ \quad \quad \quad x_2 \leq 30 \\ x_1,x_2 \quad \quad \geq 0 0 \end{cases}\]SOLUÇÃO
H:
\[\begin{cases} x_1 \geq 5 \\ x_1 \leq 2 \end{cases}\]Não existe área de intersecção.
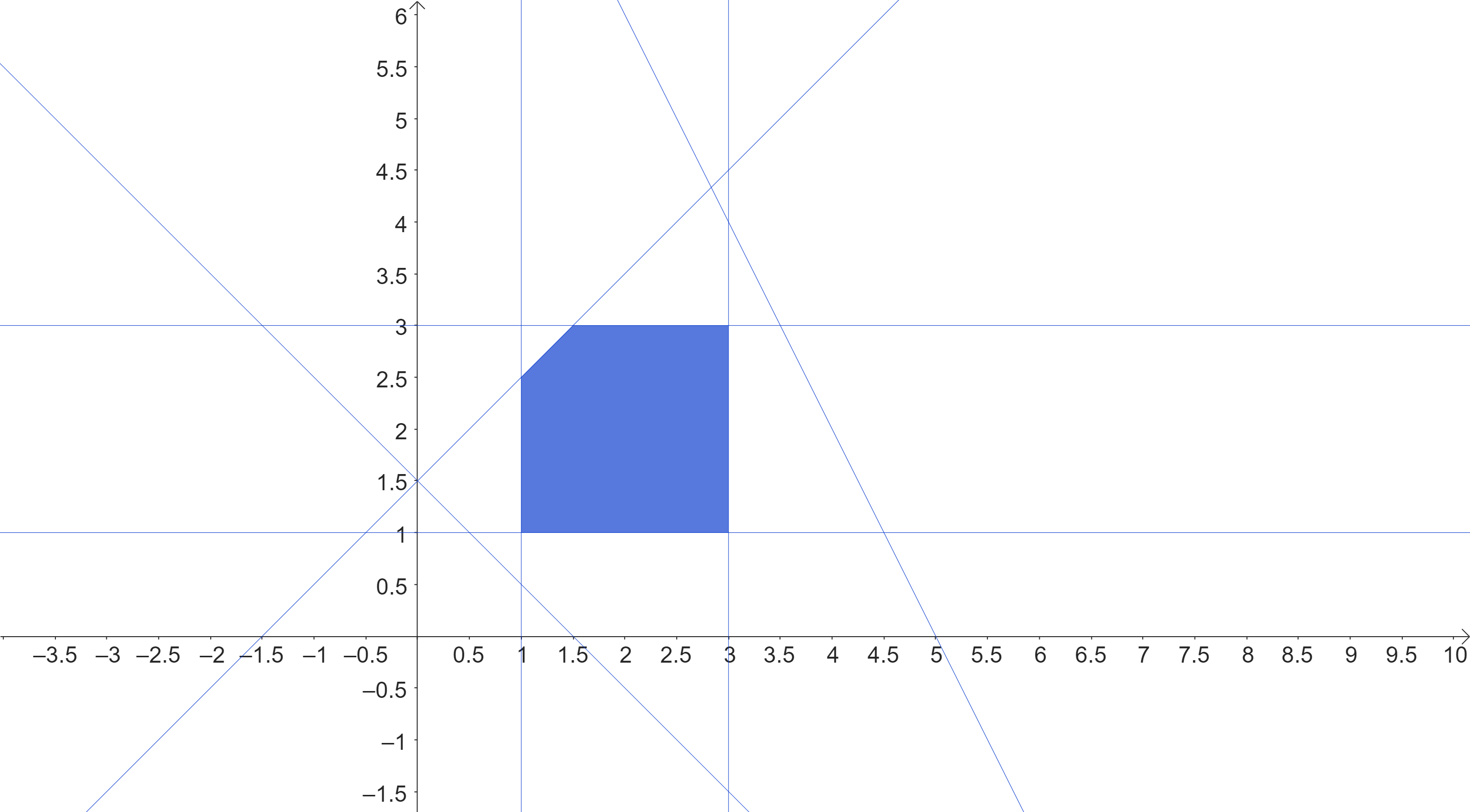
I:
\[\begin{cases} 2x_1 + 2x_2 \quad \geq 3 \\ -2x_1 + 2x_2 \leq 3 \\ 2x_1 + x_2 \quad \leq 10 \\ x_1 \quad \quad \quad \quad \leq 3 \\ x_1 \quad \quad \quad \quad \geq 1 \\ \quad \quad x_2 \quad \quad \leq 3 \\ \quad \quad x_2 \quad \quad \geq 1 \\ \end{cases}\]SOLUÇÃO
2.4 Vetor gradiente e curvas de nível
2.4.1 Gradiente
O vetor gradiente de uma função \(z\) (\(\nabla z\)) linear, é dado pelos coeficientes das variáveis da função, e indica (no plano das variáveis) a direção de crescimento da função. Para representar uma componente do vetor, parta da origem (0,0) e desenhe o final em \(\nabla z\) (coeficientes que acompanham as variáveis na função).
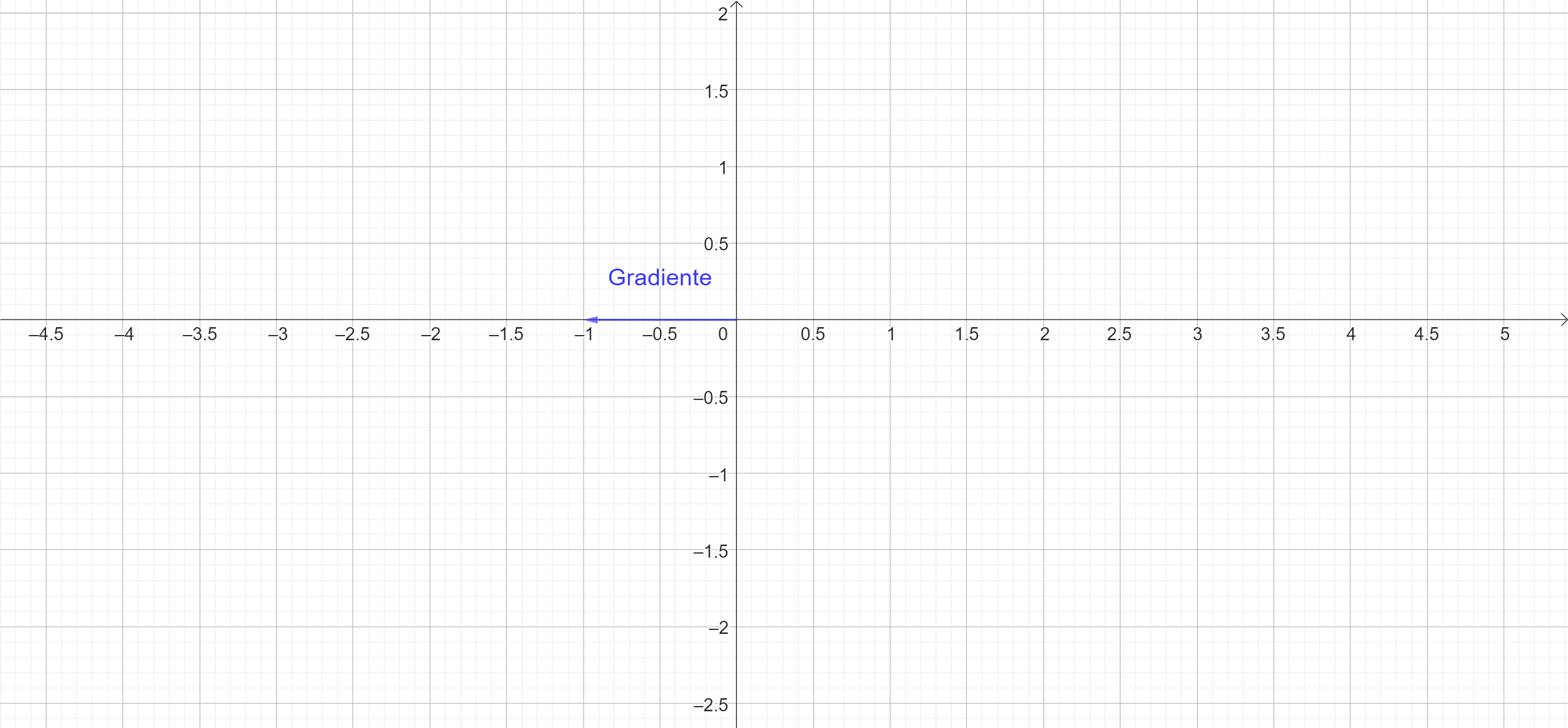
EXEMPLO: Seja a função \(z(x_1,x_2) = 10 - x_1\). O plano dessa função é:
Temos que o vetor gradiente (\(\nabla z\)) é dado por (-1,0), e representado pela seta em azul no plano 3D acima. A representação no plano 2D fica:
EXEMPLOS: Determine o vetor gradiente para as seguintes funções, e represente o vetor no plano (\(x_1,x_2\)).
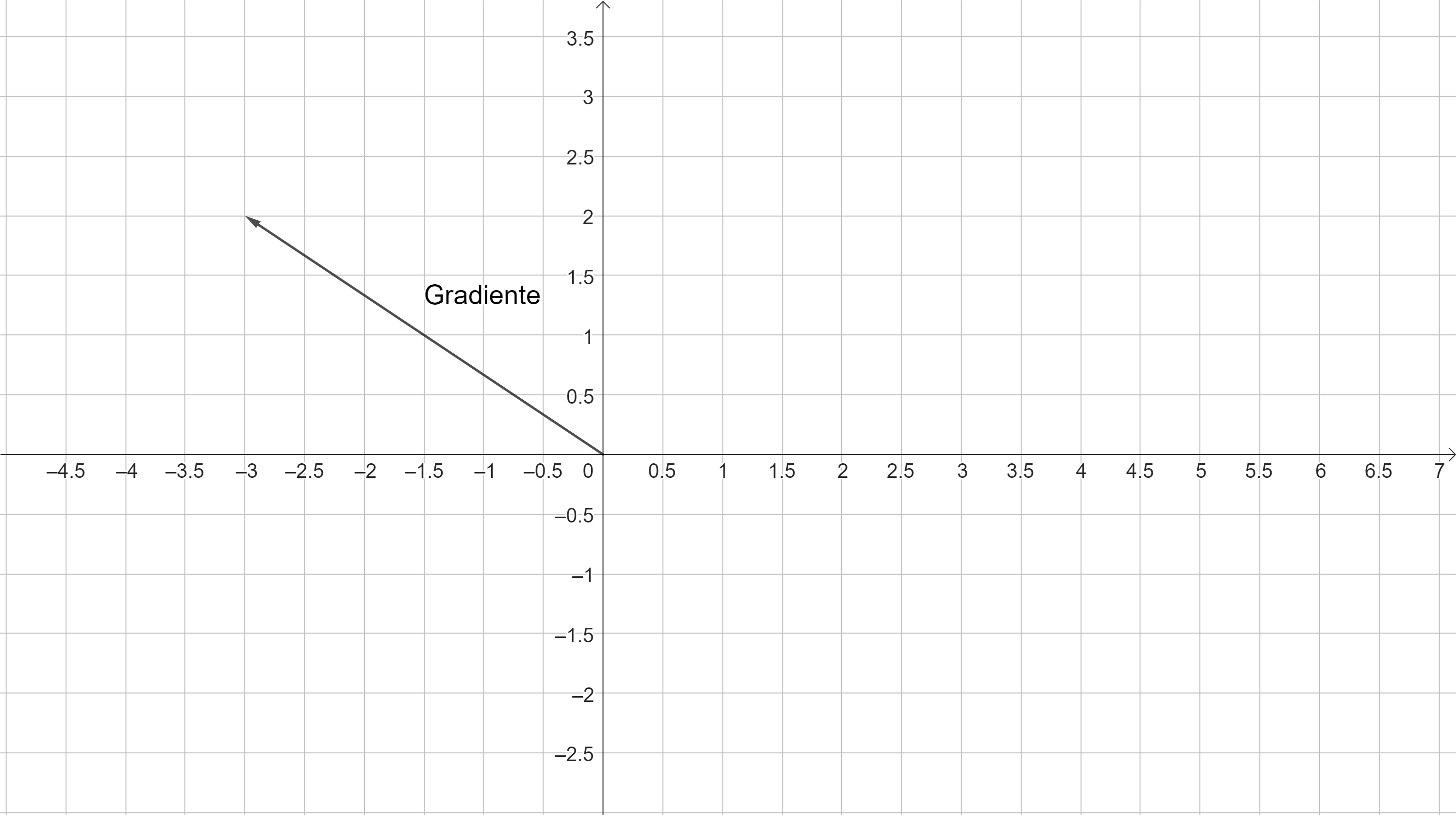
A: \(z(x_1,x_2) = -3x_1 + 2x_2\)
Temos que \(\nabla z = (-3,2)\). No plano temos então:
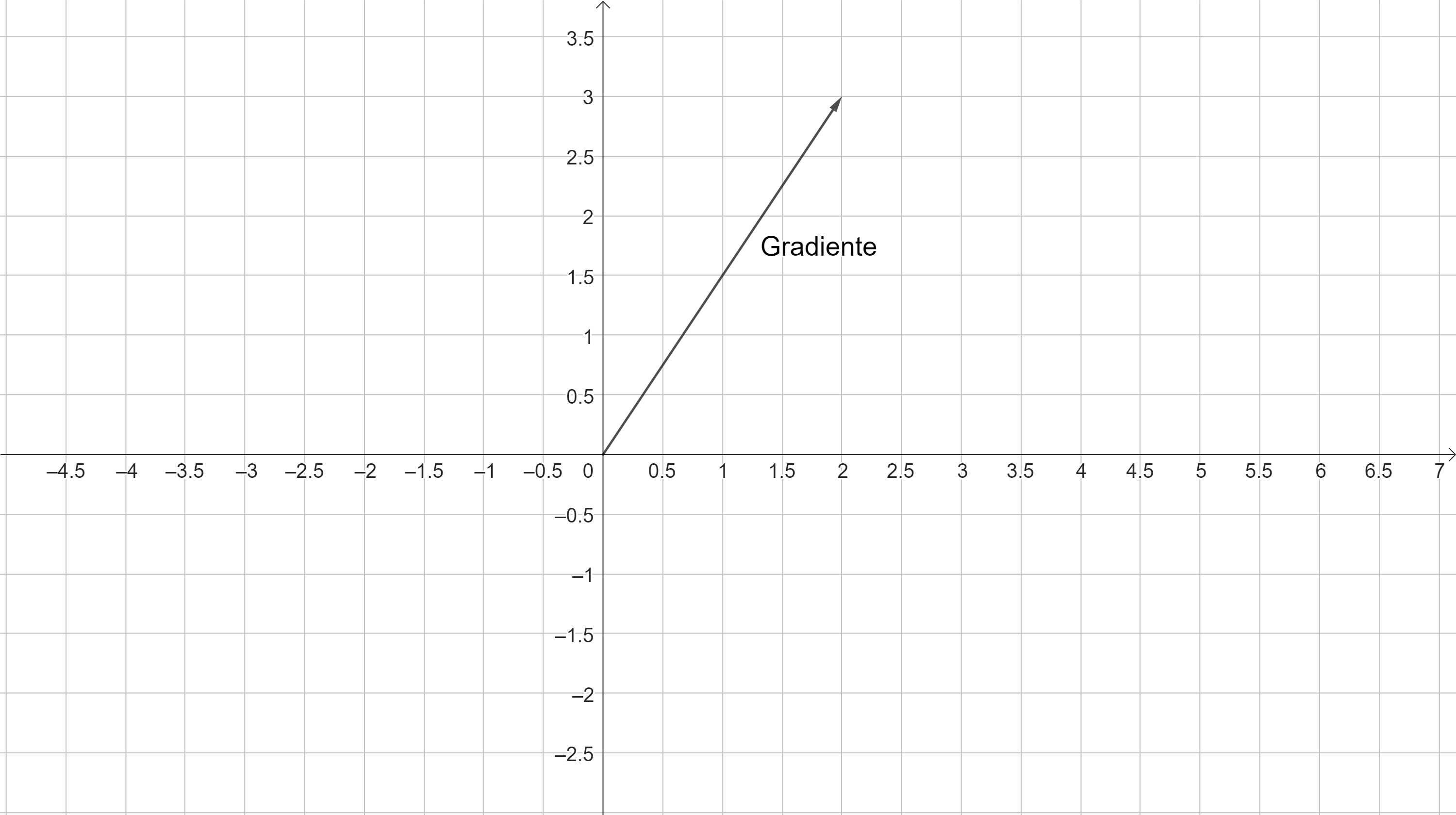
B: \(z(x_1,x_2) = 2x_1 + 3x_2\)
Nesse caso, \(\nabla z = (2,3)\), portanto:
2.4.2 Curvas de nível
As curvas de nível são conjuntos de pontos em que uma função tem valor constante. Exemplos de curvas de nível em aplicações físicas são as Isotermícas (curvas com mesma temperatura), Isobáricas (curvas com mesma pressão). As imagens abaixo mostram curvas de nível para a altura de objetos.
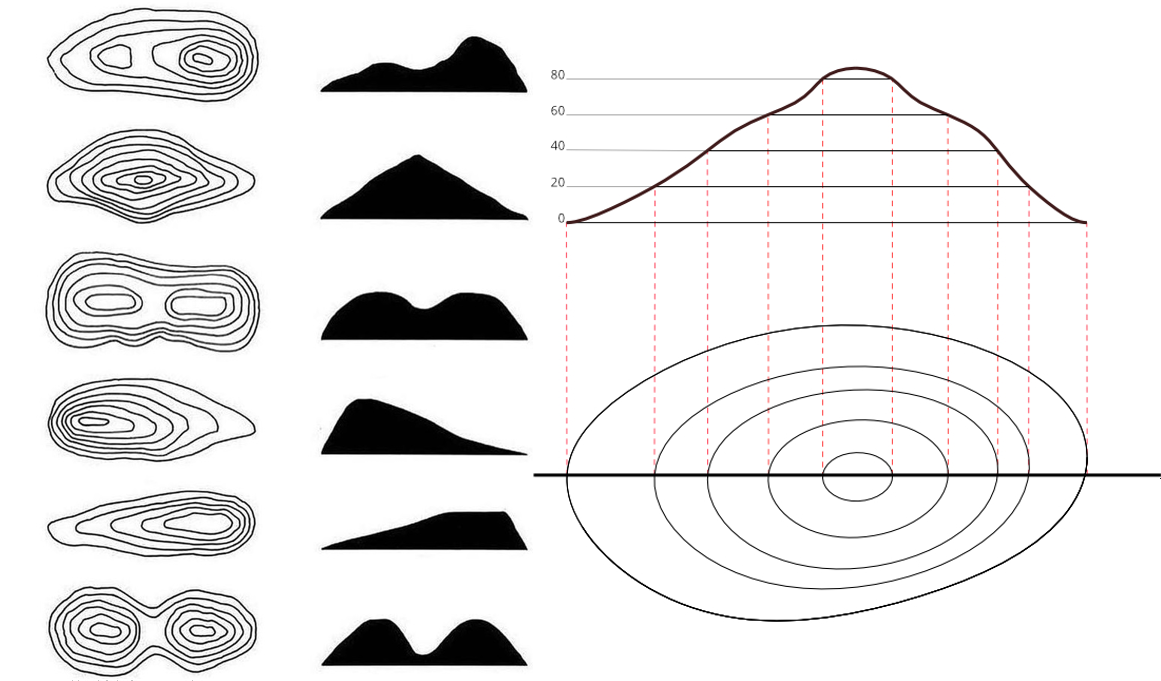
No caso acima, se alguém percorrer qualquer uma das linhas, isso implica que a pessoa se mantém a uma altura constante nas montanhas. Para encontrarmos as curvas de nível de qualquer função, basta igualar a mesma a uma constante qualquer \(k\). No exemplo acima poderímos encontrar a segunda curva de nível mais externa da figura à direita igualando a função que descreve o objeto a 20 (que é a sua altura). Abaixo segue um exemplo dinâmico para visualização das curvas de nível em 3 dimensões, usando o software Geogebra (autora: Ana Lúcia Fantin https://www.geogebra.org/u/avfantin)
VER NO GEOGEBRA
EXEMPLO: Seja a função \(z(x_1,x_2) = 10 - x_1\), encontre uma curva de nível.
Note que essa função é a mesma do primeiro exemplo de gradiente. Para encontrarmos a família de curvas de nível, basta igualarmos a função a uma constante \(K\):
\(10 - x_1 = k\)
Agora, para econontrar curvas específicas basta substituirmos valores para \(k\). Sejam duas curvas, com \(k = 0\) e \(k = 10\):
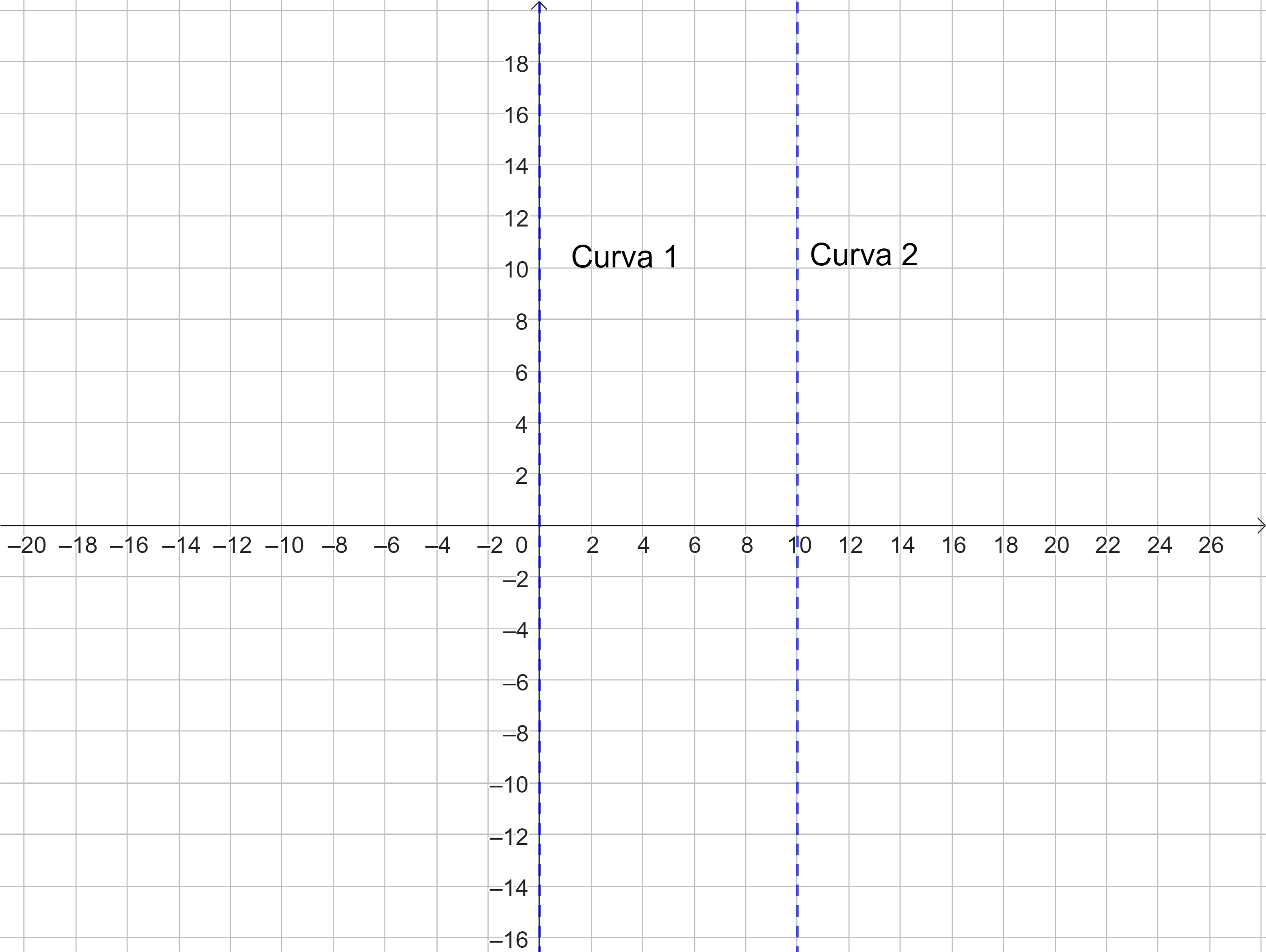
Curva 1: \(10 - x_1 + 0x_2 = 0\)
Curva 2: \(10 - x_1 + 0x_2 = 10\)
Representando as duas curvas o plano temos então:
VER NO GEOGEBRA
Compare as curvas de nível com a função. Como a função é linear e com duas variáveis, todas as curvas de nível serão retas paralelas entre si (que acompanham o crescimento do plano).
OBS: Note que as curvas de nível sempre são perpendiculares ao vetor gradiente \(\nabla\).
EXEMPLOS: Para as 2 funções do exercício de vetor gradiente, determine pelo menos uma curva de nível e plote em gráfico, junto com o vetor gradiente.
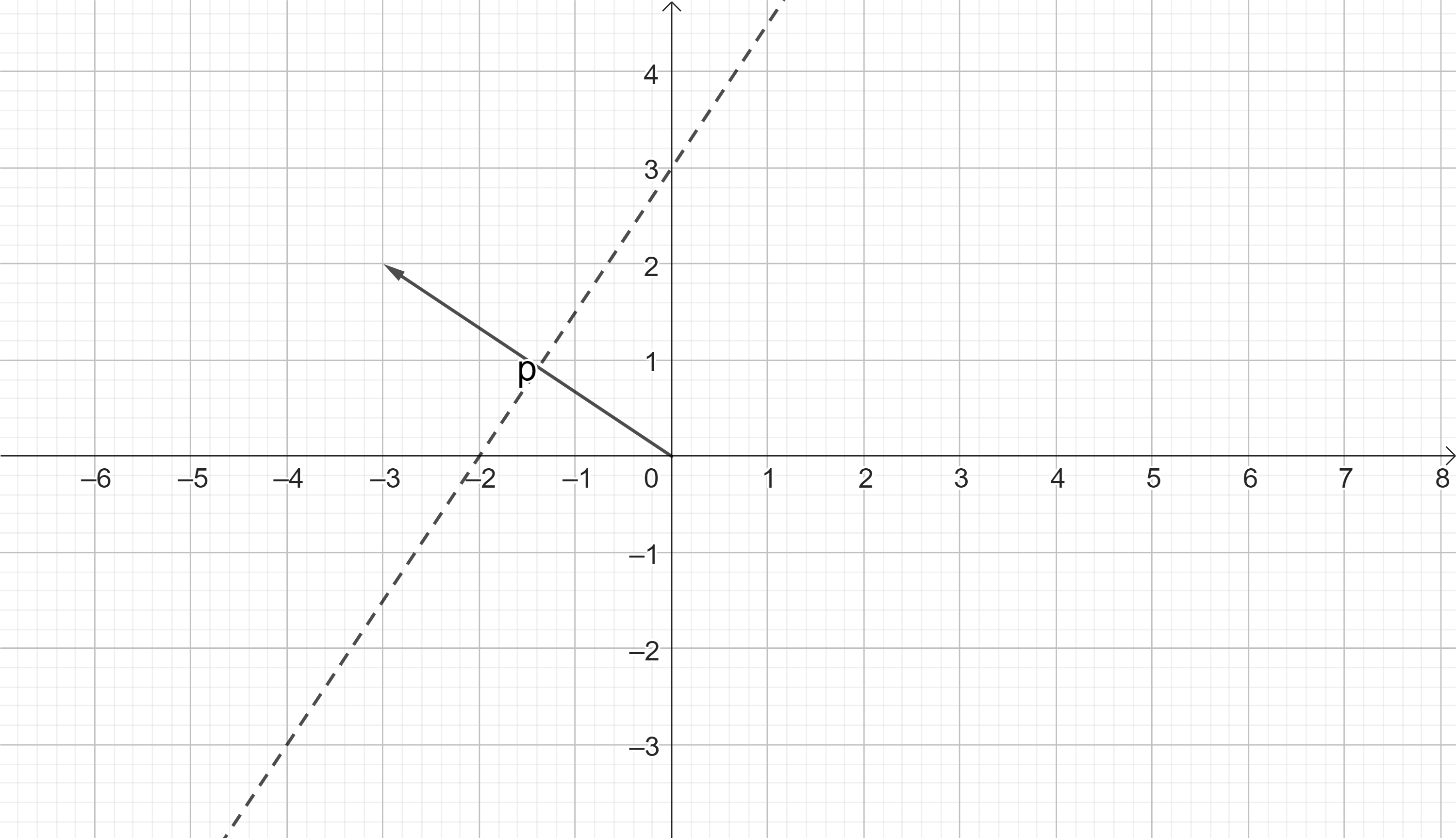
A: \(z(x_1,x_2) = -3x_1 + 2x_2\)
Fazendo a curva de nível com \(k = 6\), temos \(6 = -3x_1 + 2x_2\). Plotando temos então:
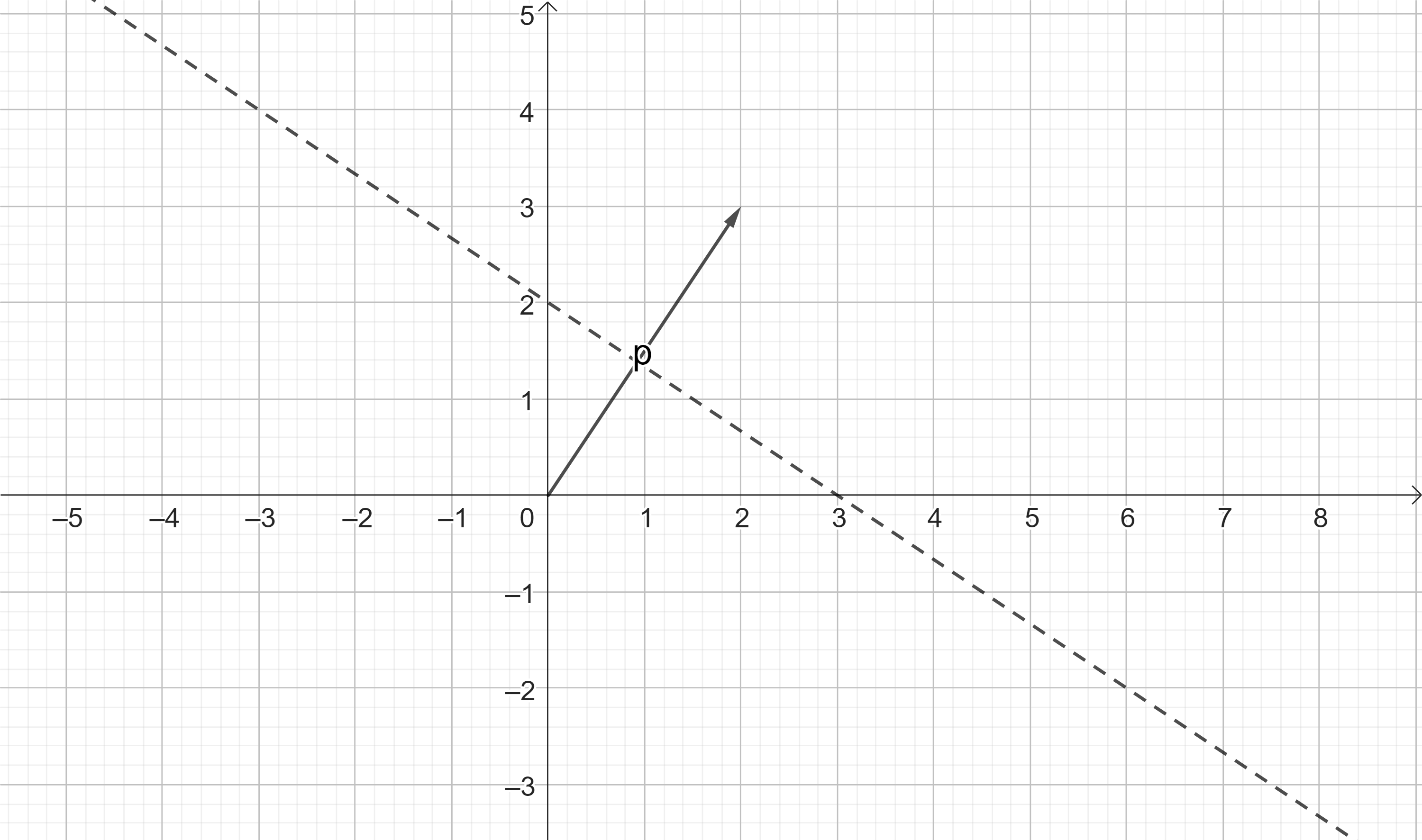
B: \(z(x_1,x_2) = 2x_1 + 3x_2\).
Também encontrando a curva de nível com \(k = 6\) temos:
\(6 = 2x_1 + 3x_2\)
Assim:
OBS1: Como estamos interessados somente na direção do vetor gradiente, podemos multiplicar o mesmo por uma constante qualquer \(C \nabla z\), de forma que a direção permanece a mesma.
OBS2: Para determinarmos a direção de crescimento, bem como a inclinação do plano da função, podemos usar uma de duas alternativas:
- \(\nabla z\) e uma curva de nível.
- 2 curvas de nível.